|
Space was so tight in the rear tube that I had to hard-wire in the Banebots ESC. This would be headache to fix in a failure but both the ESC and motor had no problems at
the event. |
| |
|

|
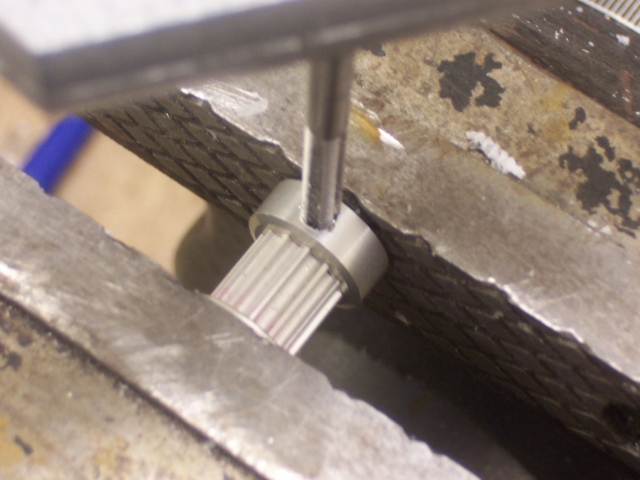
The small 12 tooth 3mm HTD pulley had a single tiny set screw as standard. I removed the screw and drilled out the hole, all the way through the pulley hub, with a 3.3mm
bit then tapped both sides M4. This let me secure the pulley with two much bigger M4 set screws. |
| |
|

|
In order to reduce the likelihood of the set screws failing, I also added two flats to the motor shaft using my trusty dremmel clone with a grinding stone. The tape
keeps the metal dust out of the motor. |
| |
|

|
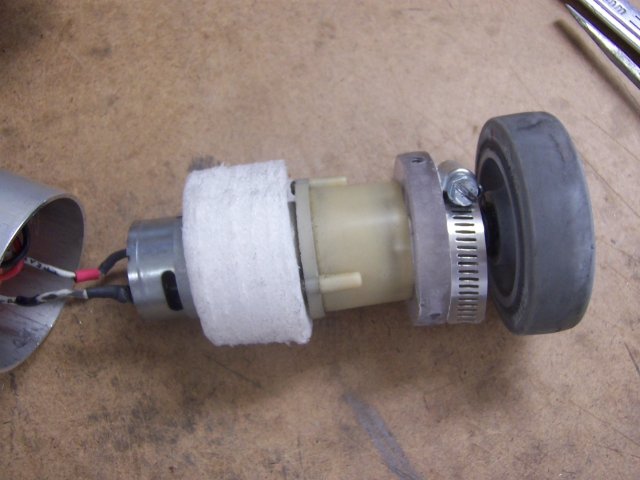
I used a hose clamp to secure the HF gearboxes to mounting plate. This worked quite well but one came loose in the last fight at Motorama. The wheel thens rubs on the
chassis but still works well enough to keep moving. |
| |
|

|
I had intended to make a 14" hardened S7 steel blade but time and money ran out so I got a 36" x 2" x 0.5" bar of 4140 "Chrome-Moly" steel and with the invaluable help
of Billy Moon of Team Moon we made three blades. A 14" one, a 13" one and finally an 11"
one. That adds up to more than 36" but if you cut the ends at an angle.......The angle was deliberate so that the back corner of the blade would not tend to push away the target as it swung past.. I
intended to harden the ends by heating to Cherry red and then quenching in water (worked well for me in the past) but again time ran out and I had to use them as-is at Moto. We had to balance the longest
blade a bit by grinding one end but the other two were fine from the start. They performed much better than I could have hoped for, slicing through the 0.040" Ti on OFBD and knocking pieces off several
other bots. |
| |
|

|
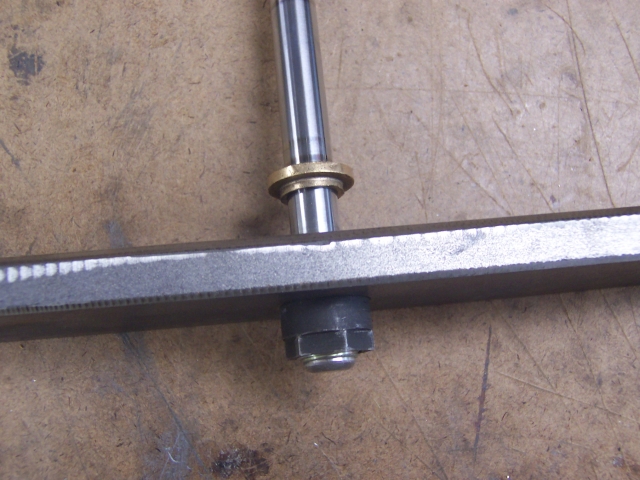
The blade is secured to the axle using a "Trantorque" Bushing. Keep the parts free of grease or oil and they work brilliantly. I cannot recommend them more
highly. The small bronze bush is a spacer to position the blade relative to the chassis. |
| |
|

|
The axle is then secured in place using the big pulley and another Trantorque bush. Again this worked well but you had to be careful to allow enough play vertically so
the axle could turn freely. |
| |
|

|
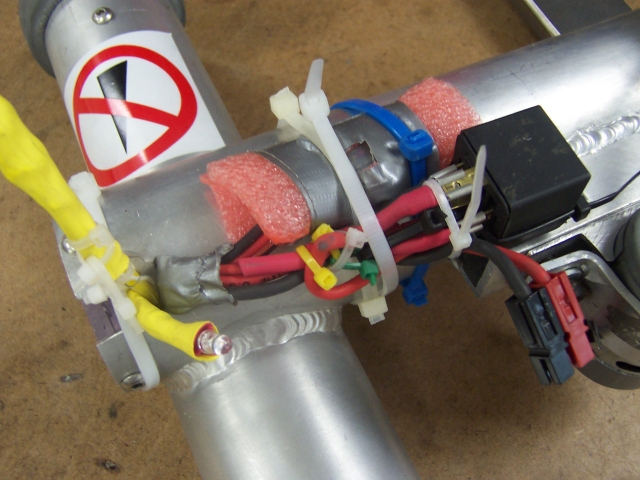
Wiring the bot proved to be a pain! The hole between the two tubes is too small to easily get the wires through from the banebots ESCs and there was not enough room to
get everything inside comfortably. |
| |
|

|
I was running out of time to get everything ready so I ended up using lots of tie wraps etc. to secure the relay and the Team Delta switch (for weapon on/off) on the out
side of the Bot. Looks messy but gave no problems at Moto. Opponents had to get past the blade first! |
| |
|
First Test |
Surgical Strike takes on the shell of the original "CheepShot". |
Second Test |
SS takes on the shell and a frying pan. The shell lost! |
Third |
Surgical Strike attacks a frying pan. |
| |
|

|
Surgical Strike and the other bots ready for Motorama |
| |
|
| |
Surgical Strike performed much better than wecould have hoped for at Motorama. Spin up time is good, Hits are hard, causing real damage to opponents and finally the bot
proved very reliable with only one weapon drive motor failure during the whole event. The chassis design proved itself with zero distortion. We need to work on a roll over bar or similar so that it
will self-right and it would be nice to perhaps make a new chassis with a little more room inside so that more of the vulnerable parts can be protected. We could also try a longer blade, 16" or so is
possible and we can try other gear ratios for the belt drive as well.24V would double the power as well........ |